
from visual import *
R=0.5; x=0.
dotv=vector(0,-R,0)
scene = display(width=1200, height=500, center=(5,0,0), background=(0.5,0.5,0))
xaxis=arrow(pos=(0,0,0),axis=(1,0,0),length=3,shaftwidth=0.05,color=color.red)
yaxis=arrow(pos=(0,0,0),axis=(0,1,0),length=3,shaftwidth=0.05,color=color.green)
zaxis=arrow(pos=(0,0,0),axis=(0,0,1),length=3,shaftwidth=0.01,color=color.blue)
floor=box(pos=(5,-R,0),length=10, height=0.1, width=1,color=(0.2,0.2,1))
f = frame()
ball=sphere(frame=f, pos=(0,0,0), radius=R, color=color.red)
dot=sphere(frame=f, pos=dotv, radius=0.1*R, color=color.yellow)
cyc=sphere(pos=dotv, radius=0.1*R, color=color.yellow, make_trail=True)
w=2.*pi/1.
v=R*w
dt=0.01
delta=w*dt
t=0.
while True:
if(t > 3.): break
rate(20)
f.rotate(angle=delta, axis=(0,0,-1), origin=(0,0,0))
x=x+v*dt
f.pos=(x,0,0)
cyc.pos= f.frame_to_world(dot.pos)
t=t+dt
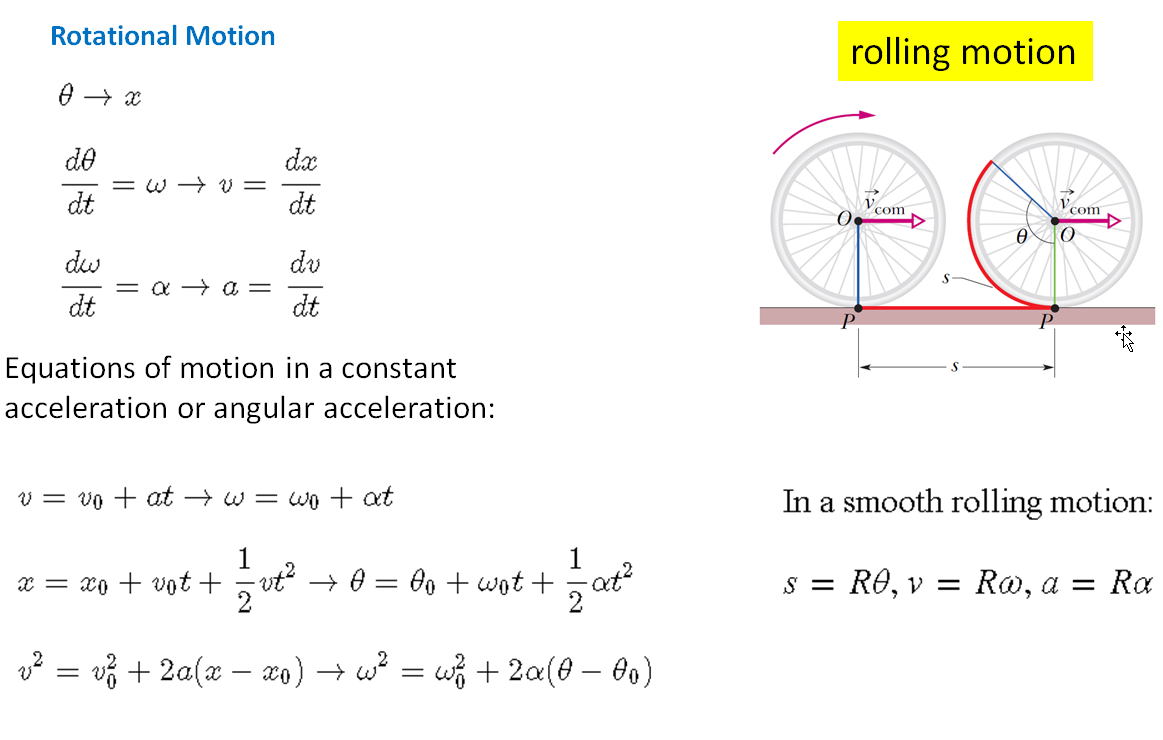
5. 等加角速率轉動:
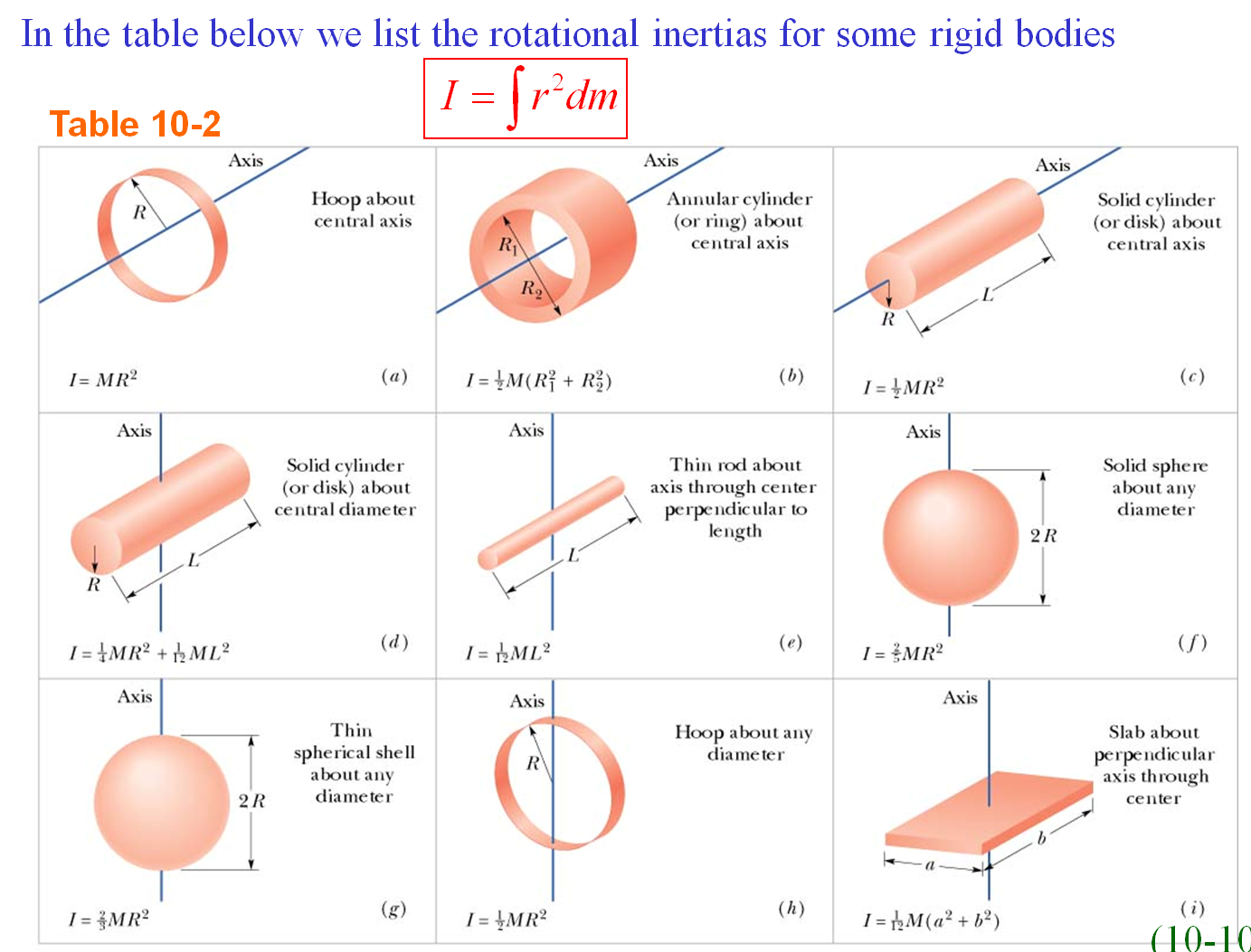
就像自由落體是一個等加速度運動一樣,在轉動運動當中我們也可以用運動方程式的差分近似,來模擬一顆球的等加角速率轉動問題。在下面的例子當中,我們讓一顆球受到一個環繞著他的細線的牽引,而繞著軸心進行等加角速率運動。牽引的力量來自於細線尾端所懸掛著的一個重物,受到重力作用而向下作落體運動。在這個運動當中加速轉動是來自於細線在球的邊緣施加了一個力矩,力矩是角加速率的來源:\(\tau=I\alpha\),I是球的轉動慣量\(I=\frac{2}{5}mR^2\)。
from visual import *
R=1; m_W=10.; m_ball=10; I=2./5.*m_ball*R**2; g=9.8; y0=-2
scene = display(width=1000, height=1000, center=(0,-10,0), background=(0.5,0.5,0))
xaxis=arrow(pos=(0,0,0),axis=(1,0,0),length=3,shaftwidth=0.05,color=color.red)
yaxis=arrow(pos=(0,0,0),axis=(0,1,0),length=3,shaftwidth=0.05,color=color.green)
zaxis=arrow(pos=(0,0,0),axis=(0,0,1),length=3,shaftwidth=0.01,color=color.blue)
weight=box(pos=(R,y0,0),length=1, height=1, width=1,color=(1,0.2,1))
arr=arrow(pos=(R,0,0),axis=(R,y0,0),shaftwidth=0.1)
f = frame(pos=(0,0,0))
ball=sphere(frame=f, pos=(0,0,0), radius=R, color=color.red)
dot=sphere(frame=f, pos=(R+0.01,0,0), radius=0.1*R, color=color.yellow)
a=m_W*g/(m_W+I/R**2)
w=0.; th=0.; y=y0; v=0.
dt=0.01
t=0.
while True:
if(abs(y) > 20.): break
rate(20)
v=v-a*dt
y=y+v*dt
weight.pos.y += v*dt
arr.axis=weight.pos-arr.pos
alpha=a/R
w=w+alpha*dt
delta=w*dt
th=th+delta
f.rotate(angle=delta, axis=(0,0,-1), origin=(0,0,0))
t=t+dt
Exercise 1.
Exercise 2.
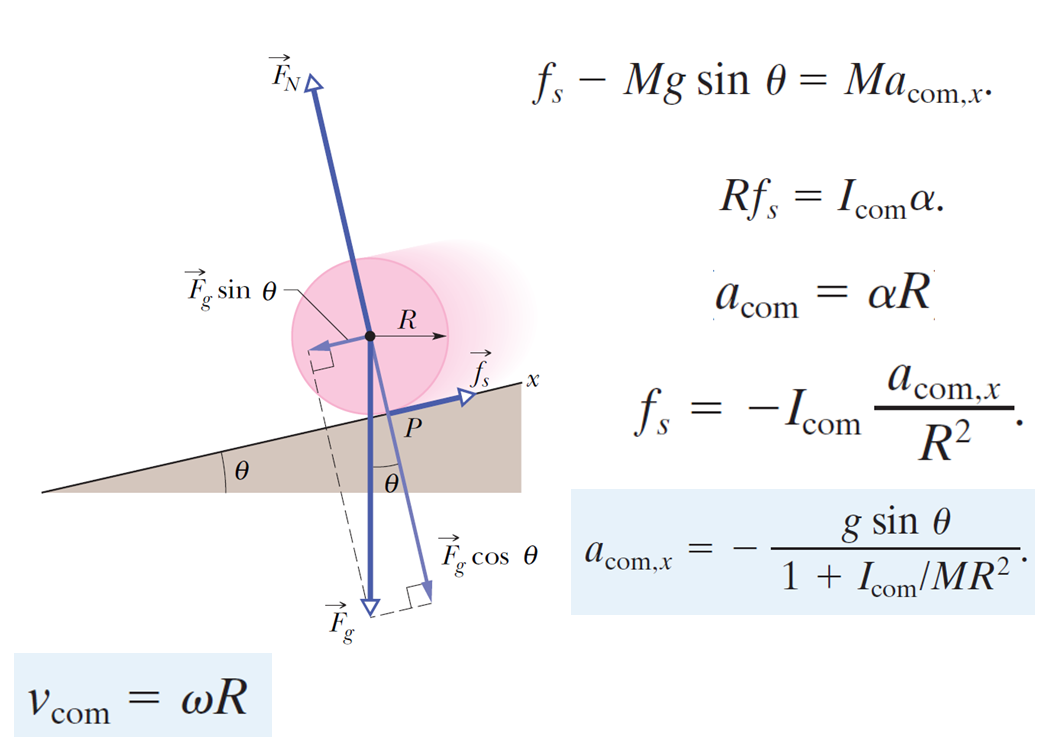
6. 從斜面上滾落的球:
from visual import *
Lx=10.; R=0.5; g=9.8; th=radians(30.); beta=0.5; x=0.
dotv=vector(0,0.4,0.3)
scene2 = display(width=1000, height=1000, center=(-Lx/2,-3,0), background=(1,1,1))
xaxis=arrow(pos=(0,0,0),axis=(1,0,0),length=3,shaftwidth=0.05,color=color.red)
yaxis=arrow(pos=(0,0,0),axis=(0,1,0),length=3,shaftwidth=0.05,color=color.green)
zaxis=arrow(pos=(0,0,0),axis=(0,0,1),length=3,shaftwidth=0.01,color=color.blue)
ramp=box(axis=(cos(th),sin(th),0),pos=(-Lx/2,0,0),length=10, height=0.01, width=1,color=(0.2,0.2,1))
ramp.pos.y=-Lx/2*sin(th)-R*2.
bp=vector(0,0,0)
f = frame(pos=(0,0,0))
ball=sphere(frame=f, pos=bp, radius=R, color=color.red)
dot=sphere(frame=f, pos=bp+dotv, radius=R/5., color=color.yellow)
ball2=sphere(pos=bp, radius=R, color=color.red
,make_trail=True,trail_type="points", interval=10)
w=10.
vs=R*w
s=-5.
dt=0.01
t=0.
while True:
if(t > 4.): break
rate(20)
ac=-g*sin(th)/(1.+beta)
alpha=ac/R
w=w+alpha*dt
delta=w*dt
vs=vs+ac*dt
s=s+vs*dt
f.rotate(angle=delta, axis=(0,0,-1), origin=(0,0,0))
ballpos=vector(s*cos(th),s*sin(th),0)
f.pos=ballpos
ball2.pos=ballpos
t=t+dt
7. 角動量守恆:
from visual import *
g=9.8; R=0.5; H=1.2;M=5; MA=5
scene2 = display(width=800, height=800, center=(0,0,0), background=(0.5,0.5,0))
yaxis=arrow(pos=(0,0,0),axis=(0,1,0),length=3,shaftwidth=0.05,color=color.green)
floor1=box(length=10,height=0.02,width=2,pos=(4,-R,0))
f = frame()
sphere1=sphere(frame=f, pos=(0,0,0), radius=R, color=color.red)
arm=cylinder(frame=f, pos=(-H/2,0,0), radius=R/2., axis=(H,0,0)
,color=color.white)
omega=100.
Imom=2./5.*M*R**2+MA*H**2/12.
Lmom0=Imom*omega
dt=0.001
while True:
rate(100)
dth=omega*dt
f.rotate(angle=dth, axis=(0,1,0), origin=(f.pos))
H=H+1.5*dt
arm.pos=vector(-H/2,0,0)
arm.axis=vector(H,0,0)
Imom=2./5.*M*R**2+MA*H**2/12.
omega=Lmom0/Imom
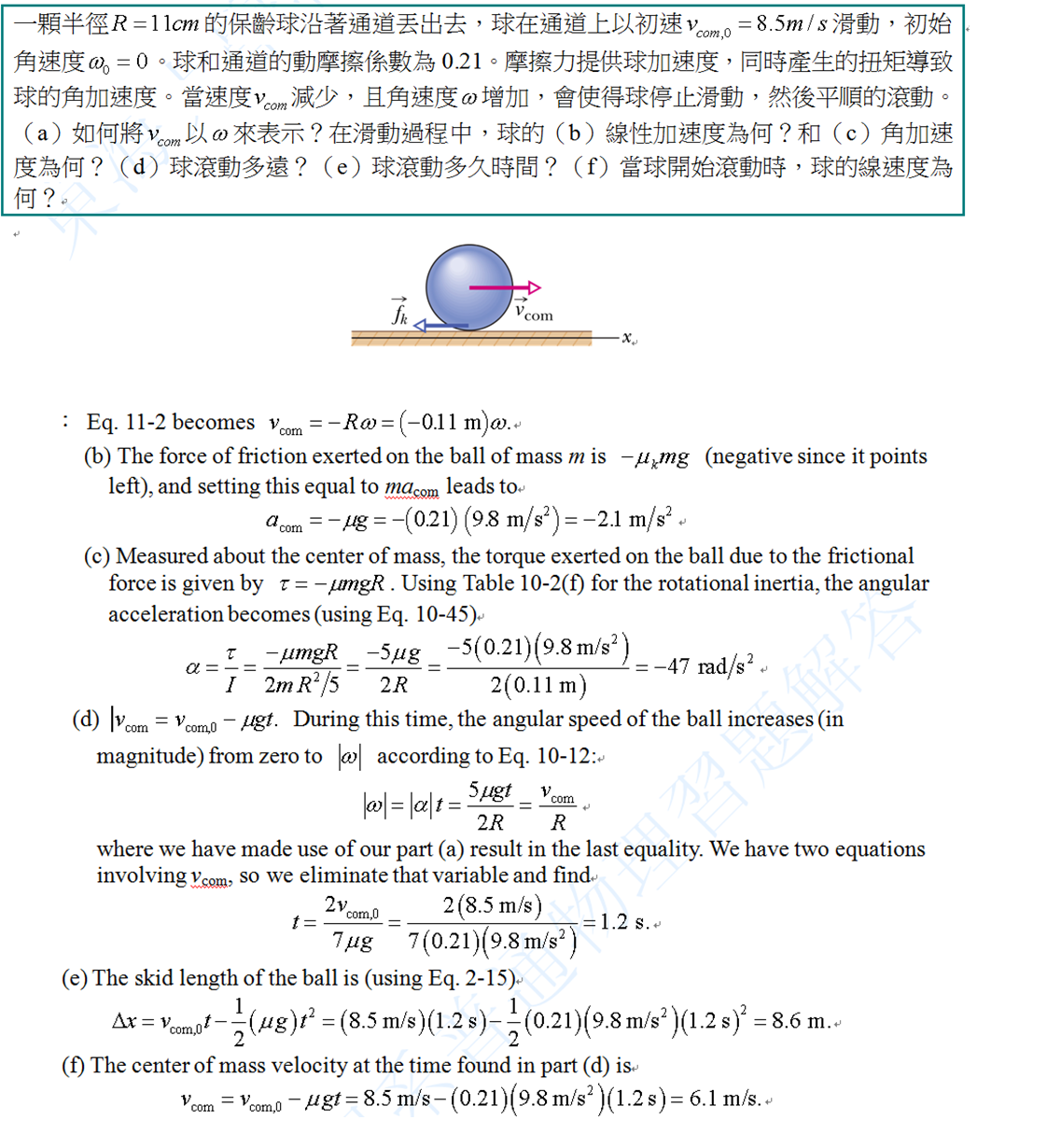
8. 保齡球的運動:
from visual import *
R=0.8; m=0.5; Lx=40
scene2 = display(width=1200, height=600,
center=(Lx/2.,0,0), background=(0.5,0.5,0))
xaxis=arrow(pos=(0,0,0),axis=(1,0,0),length=3,shaftwidth=0.05,color=color.red)
yaxis=arrow(pos=(0,0,0),axis=(0,1,0),length=3,shaftwidth=0.05,color=color.green)
zaxis=arrow(pos=(0,0,0),axis=(0,0,1),length=3,shaftwidth=0.01,color=color.blue)
floor1=box(length=Lx,height=0.02,width=2,pos=(Lx/2,-R,0))
f1 = frame()
sphere1=sphere(frame=f1, pos=(0,0,0), radius=R, color=color.red)
sphere2=sphere(frame=f1, pos=(R,0,0), radius=0.001, color=color.white)
spot1=sphere(pos=(R,0,0), radius=0.10, color=color.white,make_trail=True)
I=2./5.*m*R**2
fk=1.2
w1=0.
x1=0.; v1=15.; th1=0.; dt=0.01; t=0.; nn=0
while True:
rate(10)
if(x1 > 40.): break
if(R*w1 < v1):
a1=-fk/m
alpha1=R*fk/I
else:
nn=nn+1
if(nn==1): spot2=sphere(pos=spot1.pos, radius=0.20, color=color.black)
a1=0.
alpha1=0.
x1=x1+v1*dt
v1=v1+a1*dt
w1=w1+alpha1*dt
dth1=w1*dt
f1.rotate(angle=dth1, axis=(0,0,-1), origin=(x1,0,0))
f1.pos=vector(x1,0,0)
wspot1_pos = f1.frame_to_world(sphere2.pos)
spot1.pos=wspot1_pos
th1=th1+dth1
t=t+dt