-
行列式
-
2階矩陣的行列式:
\( {\begin{vmatrix}a_{1,1}&a_{1,2}\\a_{2,1}&a_{2,2}\end{vmatrix}}=a_{1,1}a_{2,2}-a_{1,2}a_{2,1} \) -
3階矩陣的行列式:
\( \begin{vmatrix}a_{1,1}&a_{1,2}&a_{1,3}\\a_{2,1}&a_{2,2}&a_{2,3}\\a_{3,1}&a_{3,2}&a_{3,3}\end{vmatrix}\\=a_{1,1}a_{2,2}a_{3,3}+a_{1,2}a_{2,3}a_{3,1}+a_{1,3}a_{2,1}a_{3,2}\\-a_{1,3}a_{2,2}a_{3,1}-a_{1,1}a_{2,3}a_{3,2}-a_{1,2}a_{2,1}a_{3,3} \) -
反矩陣
線性代數2:行列式與反矩陣
在我們實際的應用中,numpy有一個函數副程式,np.linalg.det可以直接使用來計算矩陣的行列式值
np.linalg.det(A)
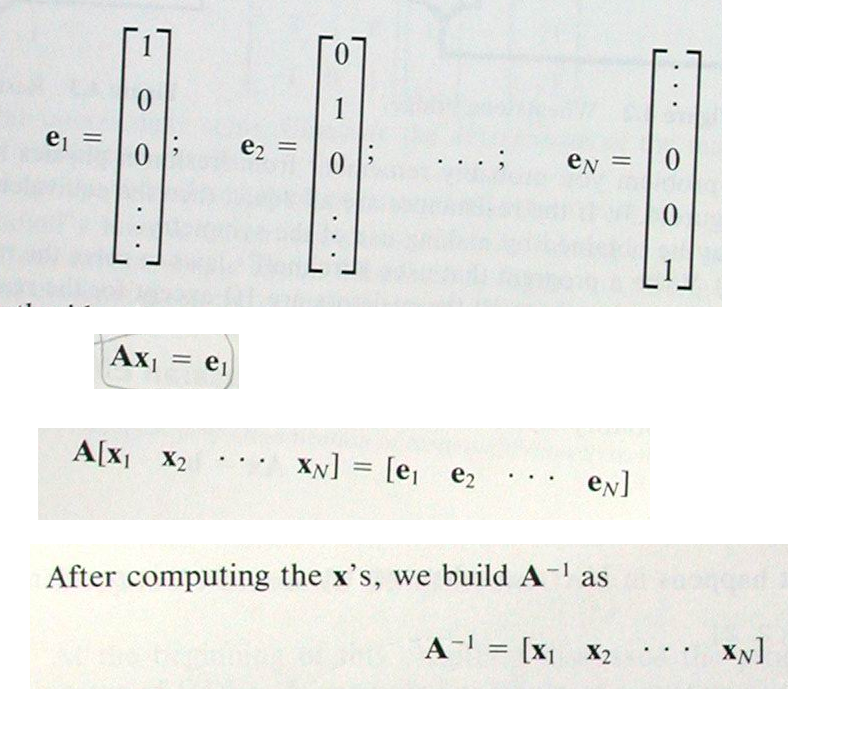
For each \(\mathbf{b}_i\) we solve the following matrix equation: \[ \mathbf{Ax}_i = \mathbf{b}_i \] \(\mathbf{x}_i\) is the i-th column vector of the inverse matrix \(\mathbf{A}^{-1}\). Once we solved all \(\mathbf{x}_i\) we obtain the inverse of \(\mathbf{A}\), i.e., \(\mathbf{A}^{-1}\).
在我們實際的應用中,numpy有一個函數副程式,np.linalg.inv可以直接使用來計算反矩陣
A_inverse = np.linalg.inv(A)
import numpy as np
A=np.mat([[2,-2,0],
[-2,1,-2],
[0,-2,0]])
print 'A=\n',A
detA=np.linalg.det(A) #計算行列式
print '\n\nUse np.linalg.det to get det(A)=',detA
Ai=np.linalg.inv(A) #計算反矩陣/pR>
print '\n\nUse np.linalg.inv to get Ai=\n',Ai
I=np.dot(Ai,A) #計算矩陣相乘,驗證Ai乘A等於I,單位矩陣
print '\n\nUse np.dot(Ai,A) to check identity mat, I=\n',I
import numpy as np# function inverse is defined to calculate the inverse # matrix by solving LSE def inverse(N,a): z=[] for i in range(N): a0=a b=[0 for j in range(N)] b[i]=1 x=np.linalg.solve(a0, b) I=np.dot(a, x) z.append(x) a1=np.array([z[i] for i in range(N)]) ai=a1.transpose() return ai a = np.array([[3,1], [1,2]]) ai=inverse(2,a) print 'use inverse, ai_2x2=\n',ai print 'np.linalg.inv(a)=\n',np.linalg.inv(a) # solve 3x3 cy=d c = np.array([[1,1,1], [3,1,0], [-1,0,1]]) ci=inverse(3,c) print 'use inverse, ci_3x3=\n',ci print 'np.linalg.inv(c)=\n',np.linalg.inv(c) print 'check c dot ci=I=\n',np.dot(c, ci)